फोर-व्हील ड्राइव्ह काय चांगले आहे, समोर किंवा मागील
सामग्री
कारमधील ड्राइव्ह म्हणजे इंजिनपासून कोणत्याही चाकावर टॉर्कचे हस्तांतरण, जे नंतर ड्राइव्ह बनते. त्यानुसार, सर्व वाहनांमध्ये व्हील फॉर्म्युलासारखे महत्त्वपूर्ण वैशिष्ट्य असणे सुरू होते, जिथे पहिल्या अंकाचा अर्थ चाकांची एकूण संख्या आणि दुसरा - ड्रायव्हिंगची संख्या.

परंतु ही संकल्पना ऑटोमोबाईल चेसिसची आणखी एक महत्त्वाची मालमत्ता प्रतिबिंबित करत नाही, कोणते धुरे अर्धवेळ ड्राइव्ह, मागील किंवा समोर आहेत? जरी ऑल-व्हील ड्राईव्ह कारसाठी 4 × 4 किंवा अगदी 6 × 6 हे काही फरक पडत नाही.
फोर-व्हील ड्राइव्ह म्हणजे काय, मागील आणि समोरील फरक
प्रत्येक प्रकाराचे स्वतःचे फायदे आणि तोटे आहेत, म्हणून ते अजूनही सापेक्ष संतुलनात अस्तित्वात आहेत. सैद्धांतिक दृष्टिकोनातून, एक किंवा दुसर्या चाकावर कर्षण प्रसारित करणारे ट्रान्समिशन भाग काढून टाकून ऑल-व्हील ड्राइव्ह कारमधून फ्रंट- किंवा रीअर-व्हील ड्राइव्ह कार मिळविली जाते. खरं तर, तंत्रज्ञान साध्य करणे इतके सोपे नाही.
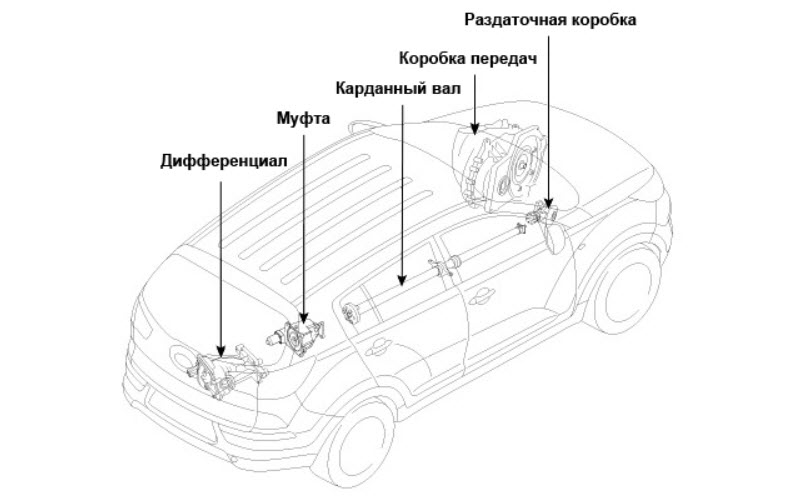
ऑल-व्हील ड्राईव्ह वाहनाचे अनिवार्य युनिट म्हणजे ट्रान्सफर केस किंवा ट्रान्सफर केस, जे एक्सलसह टॉर्क वितरीत करते.
मोनो-ड्राइव्ह कारमध्ये, त्याची आवश्यकता नाही, परंतु ते फक्त वगळले जाऊ शकत नाही, ट्रान्सफर केस पॉवर युनिटच्या सामान्य योजनेमध्ये समाकलित केले गेले आहे, म्हणून संपूर्ण कार पुनर्रचनाच्या अधीन आहे.
उलट केसांप्रमाणे, जर ऑल-व्हील ड्राइव्ह बदल सुरुवातीला जोडला गेला असेल, उदाहरणार्थ, त्याच मॉडेलच्या फ्रंट-व्हील ड्राइव्ह कार, यामुळे मोठ्या गुंतागुंत निर्माण होतील.
बरेच उत्पादक त्यांच्या हॅचबॅक आणि सेडानमध्ये 4 × 4 आवृत्ती जोडण्याचा प्रयत्न देखील करत नाहीत, ग्राउंड क्लीयरन्समध्ये वाढ आणि क्रॉस-फेरफारसाठी प्लास्टिक बॉडी किटपर्यंत मर्यादित ठेवतात.
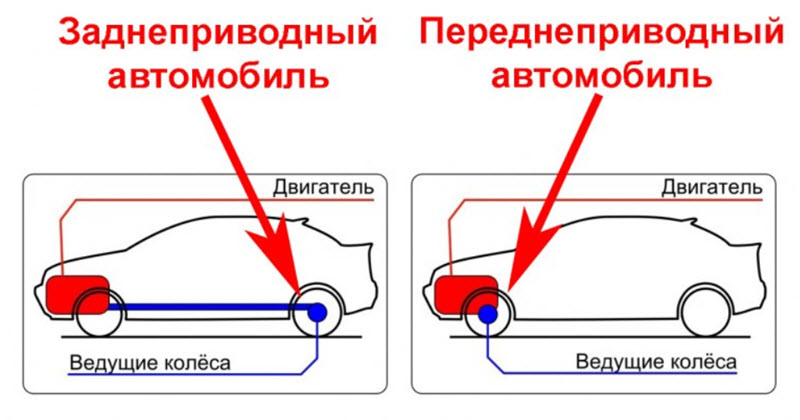
हे एकूण मांडणीवर देखील लागू होते. ऐतिहासिकदृष्ट्या, फ्रंट-व्हील ड्राइव्ह वाहनांमध्ये, पॉवर युनिट इंजिनच्या डब्यात स्थित आहे, गिअरबॉक्स दोन शाफ्टसह सुसज्ज आहे ज्यामध्ये स्थिर वेग जोडणे (सीव्ही जॉइंट्स) समोरच्या चाकांकडे जातात, जे एकाच वेळी चालवले जातात आणि नियंत्रित केले जातात.
रीअर-व्हील ड्राइव्हसाठी, त्याउलट, बॉक्ससह मोटर कारच्या अक्षासह स्थित आहे, नंतर ड्राइव्हशाफ्ट मागील धुराकडे जाते. या दोन्ही प्रकरणांमध्ये विविध स्तरांच्या जटिलतेसह फोर-व्हील ड्राइव्हची अंमलबजावणी केली जाऊ शकते.
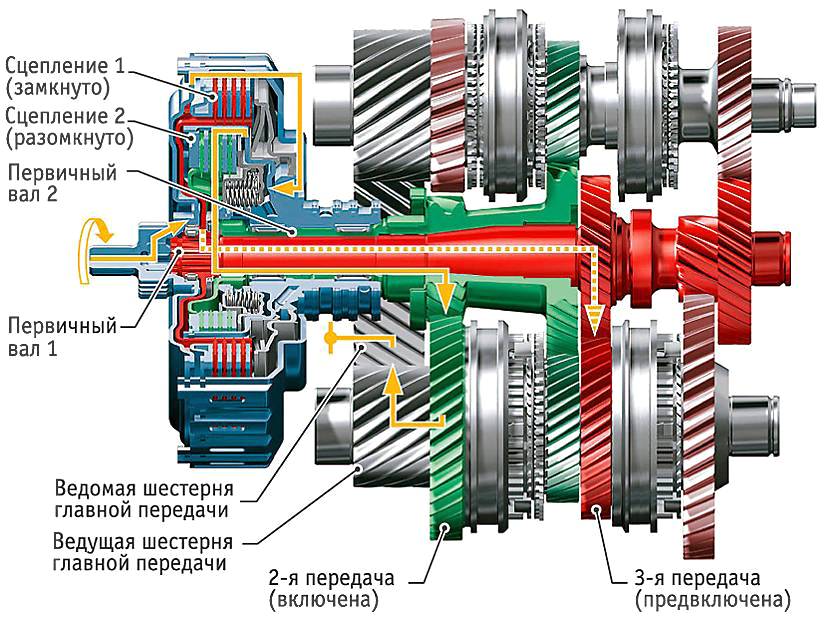
डिव्हाइस आणि ऑपरेशनचे सिद्धांत
टॉर्क प्रसारित करण्यासाठी, ट्रान्समिशन तयार करणारे घटक आणि असेंब्लीचा संच वापरला जातो.
यात हे समाविष्ट आहे:
- गिअरबॉक्स (गिअरबॉक्स), एकूण गीअर गुणोत्तरातील बदलांसाठी जबाबदार, म्हणजेच, इंजिन शाफ्ट रोटेशन गती आणि ड्राइव्ह चाकांच्या गतीचे गुणोत्तर;
- ट्रान्सफर केस, दिलेल्या गुणोत्तरामध्ये टॉर्क विभाजित करणे (समान असणे आवश्यक नाही) ड्राइव्ह एक्सल दरम्यान;
- CV जॉइंट्स किंवा हूक जॉइंट्स (क्रॉस) असलेले कार्डन गीअर्स जे वेगवेगळ्या कोनात अंतरावर रोटेशन प्रसारित करतात;
- ड्राइव्ह एक्सल गिअरबॉक्सेस, याव्यतिरिक्त रोटेशनचा वेग आणि टॉर्क ट्रान्समिशनची दिशा बदलणे;
- व्हील हबसह गिअरबॉक्सेस जोडणारे एक्सल शाफ्ट.

आधीच नमूद केल्याप्रमाणे, दोन मुख्य, ट्रान्सव्हर्स आणि रेखांशाचा पॉवर युनिट्सचे वैशिष्ट्य, योजनांच्या एकूण संचामधून वेगळे होते.
- पहिल्या प्रकरणात, ट्रान्सफर केस गिअरबॉक्सच्या बाजूला जोडलेला असतो, तर त्याला कोनीय गिअरबॉक्स देखील म्हणतात. मांडणीच्या कारणास्तव, पुढच्या चाकांपैकी एकाचा ड्राइव्ह शाफ्ट त्यातून जातो, येथे हायपोइड गियरिंगसह गियर जोडीद्वारे हा क्षण मागील धुराकडे काढला जातो, ज्यासाठी रोटेशन 90 अंश वळते आणि बाजूने चालत असलेल्या कार्डन शाफ्टकडे जाते. गाडी.
- दुसरा केस गियरबॉक्स आउटपुट शाफ्ट सारख्याच अक्षावर ट्रान्सफर केसच्या प्लेसमेंटद्वारे दर्शविला जातो. मागील चाकांपर्यंत कार्डन शाफ्ट ट्रान्सफर केसच्या इनपुट शाफ्टसह समाक्षरीत्या स्थित आहे आणि पुढील भाग त्याच कार्डन ट्रान्समिशनद्वारे जोडलेले आहेत, परंतु 180-डिग्री वळण आणि खाली किंवा बाजूला शिफ्टसह.
जेव्हा क्रॉस-कंट्री क्षमता किंवा नियंत्रणक्षमता वाढविण्यासाठी अतिरिक्त कार्ये सादर केली जातात तेव्हा razdatka अगदी सोपी असू शकते, केवळ क्षणाच्या शाखा किंवा जटिलतेसाठी जबाबदार असते:
- डिमल्टीप्लायर, म्हणजेच रस्त्यावर टॉर्क वाढवण्यासाठी ओव्हरड्राइव्ह;
- दिलेल्या प्रमाणात क्षण वितरीत करणारा केंद्र भिन्नता;
- विद्युत चुंबकीय घर्षण क्लचेस ट्रान्समिशन क्षमतांच्या स्वयंचलित नियंत्रण प्रणालीमध्ये अॅक्ट्युएटर म्हणून काम करतात;
- अतिरिक्त उपकरणांसाठी पॉवर टेक-ऑफ शाफ्ट.
4×4 मशीनवरील ड्राईव्ह एक्सल गिअरबॉक्स नियंत्रित भिन्नता किंवा इलेक्ट्रॉनिक क्लचच्या उपस्थितीमुळे देखील गुंतागुंतीचे होऊ शकतात. सक्तीचे लॉक आणि एका एक्सलचे वेगळे व्हील कंट्रोल पर्यंत.
ऑल-व्हील ड्राइव्हचे प्रकार
वेगवेगळ्या ड्रायव्हिंग मोडमध्ये, एकीकडे कार्यक्षमता आणि दुसरीकडे क्रॉस-कंट्री क्षमता वाढवण्यासाठी चाकांमधील टॉर्कचे पुनर्वितरण करणे खूप उपयुक्त आहे. शिवाय, ट्रान्समिशन जितके अधिक जटिल असेल तितके ते अधिक महाग असेल, म्हणून मशीनचे विविध प्रकार आणि वर्ग भिन्न ड्राइव्ह योजना वापरतात.
कायम
सर्व-चाक ड्राइव्ह नेहमी आणि सर्व रस्त्यांच्या परिस्थितीत वापरणे सर्वात तार्किक असेल. हे प्रतिक्रियांचे अंदाज आणि परिस्थितीतील कोणत्याही बदलासाठी मशीनची सतत तयारी सुनिश्चित करेल. परंतु हे बरेच महाग आहे, अतिरिक्त इंधन खर्च आवश्यक आहे आणि नेहमीच न्याय्य नाही.
कायमस्वरूपी ऑल-व्हील ड्राइव्ह (पीपीपी) ची क्लासिक योजना त्याच्या सर्व साधेपणात निवा सोव्हिएत कारवर वापरली जाते. एक रेखांशाचा इंजिन, नंतर एक बॉक्स, एक गियर ट्रान्सफर केस त्यास लहान कार्डन शाफ्टद्वारे जोडलेले आहे, जेथून दोन शाफ्ट पुढील आणि मागील अक्षांवर जातात.
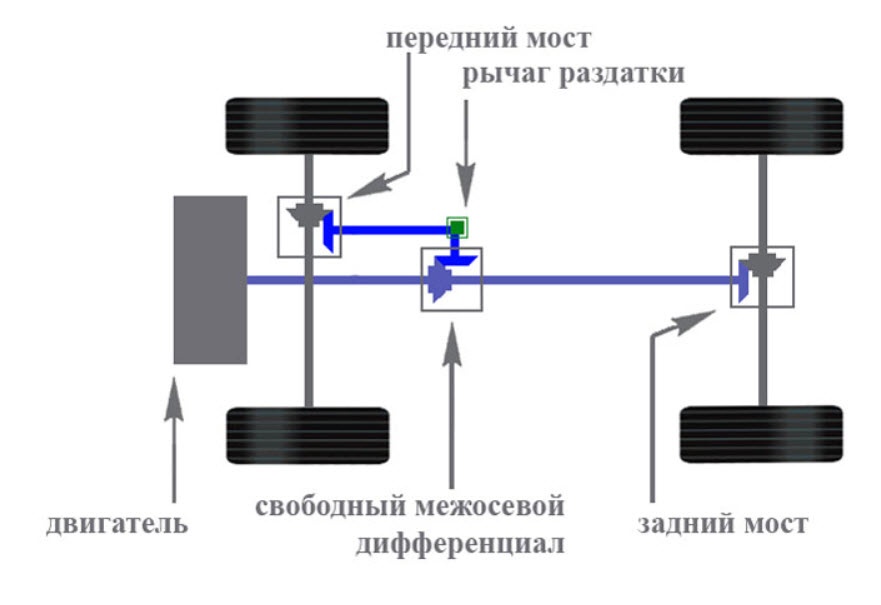
पुढील आणि मागील चाके वेगवेगळ्या वेगाने फिरण्याची शक्यता सुनिश्चित करण्यासाठी, जे कोपऱ्यातील कोरड्या फुटपाथवर महत्वाचे आहे, ट्रान्सफर केसमध्ये इंटरएक्सल फ्री डिफरेंशियल आहे, जे कमीतकमी दोन ड्राइव्ह चाके बंद ठेवण्यासाठी ब्लॉक केले जाऊ शकते. -रोड जेव्हा इतर दोन घसरतात.
एक डिमल्टीप्लायर देखील आहे जो वेगात समान घट करून थ्रस्टला अंदाजे दुप्पट करतो, जे तुलनेने कमकुवत इंजिनला खूप मदत करते.
त्यापैकी एक स्टॉल होईपर्यंत ड्राइव्हच्या चाकांवर नेहमीच टॉर्क असतो. या प्रकारच्या प्रसारणाचा हा मुख्य फायदा आहे. त्याच्या गतिशीलतेबद्दल व्यक्तिचलितपणे विचार करण्याची किंवा जटिल ऑटोमेशन तयार करण्याची आवश्यकता नाही.
स्वाभाविकच, पीपीपीचा वापर एका निवापुरता मर्यादित नाही. अनेक महागड्या प्रीमियम कारवर याचा वापर केला जातो. जिथे अंकाची किंमत खरंच काही फरक पडत नाही.
त्याच वेळी, ट्रान्समिशनला मोठ्या प्रमाणात अतिरिक्त इलेक्ट्रॉनिक सेवा पुरवल्या जातात, मुख्यत्वे जास्त शक्तीसह नियंत्रणक्षमता सुधारण्यासाठी, योजना यास परवानगी देते.

ऑटो
ऑटोमेशनसह अतिरिक्त ड्राइव्ह एक्सल कनेक्ट करण्याच्या अनेक आवृत्त्या आहेत, दोन विशिष्ट योजना ओळखल्या जाऊ शकतात, BMW आणि इतर अनेक प्रीमियम्सवर वापरल्या जाऊ शकतात आणि मास क्रॉसओव्हर्ससाठी वैशिष्ट्यपूर्ण मागील व्हील ड्राइव्हमध्ये क्लच आहे.
पहिल्या प्रकरणात, इलेक्ट्रॉनिक ड्राइव्हसह razdatka मधील तावडीत सर्वकाही नियुक्त केले जाते. तेलात काम करणार्या या क्लचला क्लॅम्पिंग किंवा विरघळवून, अक्षांच्या बाजूने विस्तृत श्रेणीतील क्षणांचे वितरण बदलणे शक्य आहे.
सहसा, शक्तिशाली इंजिनसह प्रारंभ करताना, जेव्हा मुख्य ड्राइव्हची मागील चाके घसरायला लागतात, तेव्हा त्यांना मदत करण्यासाठी पुढची चाके जोडली जातात. इतर पुनर्वितरण अल्गोरिदम आहेत, ते कंट्रोल युनिट्सच्या मेमरीमध्ये हार्डवायर केलेले आहेत जे असंख्य सेन्सर्सचे रीडिंग वाचतात.
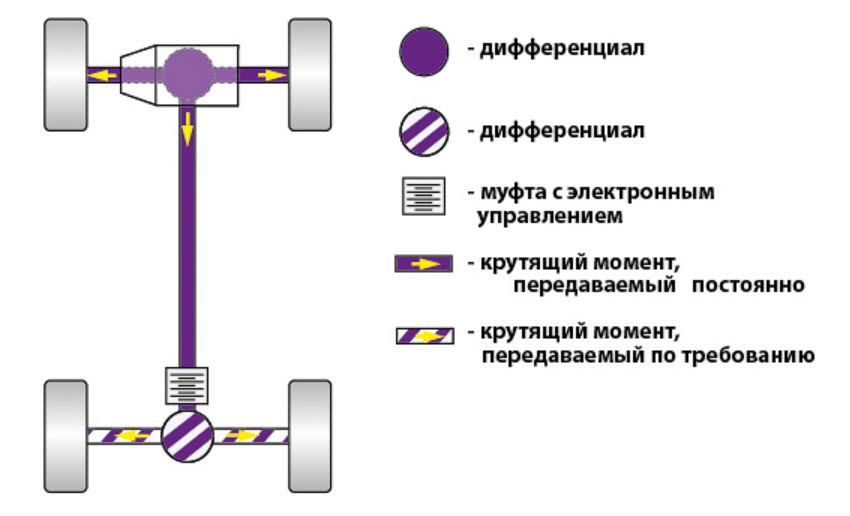
दुसरा केस सारखाच आहे, परंतु मुख्य चाके समोर आहेत आणि मागील चाके कार्डन शाफ्ट आणि एक्सल गिअरबॉक्समधील कपलिंगद्वारे थोड्या काळासाठी जोडलेली आहेत.
क्लच त्वरीत गरम होते, परंतु ते जास्त काळ काम करणे अपेक्षित नाही, काहीवेळा आपल्याला निसरड्या रस्त्यावर किंवा कठीण वळणावर कारला मागील एक्सलवर किंचित ढकलणे आवश्यक आहे. अशाप्रकारे 4 × 4 सुधारणांमधील जवळजवळ सर्व क्रॉसओव्हर्स तयार केले जातात.
जबरदस्ती
ऑल-व्हील ड्राइव्हचा सर्वात सोपा आणि स्वस्त प्रकार, युटिलिटी SUV मध्ये वापरला जातो ज्यांचे कामाचे कायमचे ठिकाण फुटपाथपासून दूर आहे. मागील एक्सल सतत ड्रायव्हिंग एक्सल म्हणून काम करते आणि आवश्यक असल्यास, ड्रायव्हर समोरचा एक्सल, कठोर, भिन्नताशिवाय चालू करू शकतो.
म्हणून, कठोर पृष्ठभागावर, कार मागील-चाक ड्राइव्ह असणे आवश्यक आहे, अन्यथा ट्रांसमिशन खराब होईल. परंतु अशा मशीनमध्ये सुरक्षिततेचे मोठे अंतर असते, ते दुरुस्तीसाठी सोपे आणि स्वस्त असतात.
अनेक आयात केलेल्या पिकअप आणि SUV मध्ये असे बदल आहेत, काहीवेळा महाग आणि अधिक प्रगत पर्यायी ड्राइव्ह आवृत्त्यांमध्ये जटिल.
4WD चे फायदे आणि तोटे (4×4)
वजा, खरं तर, एक - अंकाची किंमत. परंतु ते सर्वत्र दिसून येते:
- सुरुवातीला कार अधिक कठीण आहे, म्हणून खरेदी करताना ती महाग आहे;
- अधिक वेळा दुरुस्तीची आवश्यकता असते, अधिक उपकरणे, कमी विश्वसनीयता;
- अतिरिक्त फिरत्या भागांमुळे, जास्त इंधन वापर;
- वजन वाढते, जे गतिशीलता आणि कार्यक्षमतेवर परिणाम करते;
- युनिट्सच्या लेआउटमध्ये वाढती जटिलता, जी देखरेखीच्या जटिलतेमध्ये दिसून येते.
बाकी सर्व काही योग्य आहे:
- परिपूर्ण क्रॉस-कंट्री क्षमता, सर्व चाके टॉर्कने भरलेली आहेत;
- नियंत्रित एक्सलवरील अतिरिक्त थ्रस्ट वेक्टरमुळे मशीन अधिक चांगले नियंत्रित केले जाते;
- निसरड्या रस्त्यांवर सुधारित गतिशीलता, टायर कमी वेळा घसरतात;
- थ्रस्टचे पुनर्वितरण भागांच्या मजबुतीसाठी आवश्यकता कमी करते;
- टायर ट्रेड रबर अधिक समान रीतीने परिधान करते.
हे सर्व शक्तिशाली आणि महागड्या मशीनवर ऑल-व्हील ड्राइव्हचा व्यापकपणे वापर करणे शक्य करते, जेथे किंमतीमध्ये भर घालणे इतके महत्त्वपूर्ण नाही.
फोर-व्हील ड्राइव्ह कार कशी चालवायची
ऑल-व्हील ड्राइव्हच्या सर्व शक्यता लक्षात घेण्यासाठी, एखाद्या विशिष्ट कारच्या डिझाइन वैशिष्ट्यांचा अभ्यास करणे आवश्यक आहे, त्याची ट्रान्समिशन योजना कशी कार्य करते हे समजून घेणे आवश्यक आहे.
- अॅस्फाल्टवर इंटरएक्सल डिफरेंशियलशिवाय प्लग-इन ऑल-व्हील ड्राइव्ह वापरू नका, यामुळे जलद झीज होईल.
- कोपऱ्यातील निसरड्या रस्त्यांवर ड्रायव्हिंगचा सराव करण्यासाठी, अनेकदा ऑल-व्हील ड्राईव्ह कार, विशेषत: फ्री डिफरेंशियल किंवा ऑटोमॅटिक टॉर्क ट्रान्सफर असलेल्या, अप्रत्याशितपणे वागू शकतात, फ्रंट-व्हील ड्राईव्हपासून मागील-चाक ड्राइव्हवर वर्तन बदलू शकतात आणि त्याउलट. आणि वळणावर गॅस पेडलसह डायमेट्रिकली विरुद्ध युक्तीसह कार्य करणे आवश्यक आहे, कर्षण जोडण्यासाठी कार एकतर वळणाच्या आत स्किडसह निघून जाऊ शकते किंवा समोरचा एक्सल बाहेर सरकणे सुरू करू शकते. हेच मागील एक्सल स्किडच्या डॅम्पिंगला लागू होते जे सुरू झाले आहे.
- हिवाळ्यात 4×4 ची चांगली स्थिरता ड्रायव्हरसाठी अचानक गमावली जाऊ शकते. आपल्याला यासाठी तयार राहण्याची आवश्यकता आहे, कारण मोनो-ड्राइव्ह कार नेहमीच कर्षण कमी झाल्याची चेतावणी देतात.
- उत्कृष्ट क्रॉस-कंट्री क्षमतेमुळे चिखलाच्या “अॅम्बुशेस” किंवा बर्फाच्या शेतात अविचारी भेट होऊ नये. ट्रॅक्टरशिवाय अशा परिस्थितीतून बाहेर पडण्याची क्षमता ट्रान्समिशनमधील ऑटोमेशन क्षमतेपेक्षा निवडलेल्या टायर्सवर अवलंबून असते.
त्याच वेळी, वाजवी ड्रायव्हिंग रणनीतीमध्ये, एक ऑल-व्हील ड्राइव्ह कार नेहमीच मोनोड्राइव्ह्समध्ये होणारा त्रास टाळण्यास मदत करेल. फक्त त्याचा अतिवापर करू नका.

भविष्यात, सर्व कार ऑल-व्हील ड्राइव्ह प्राप्त करतील. हे इलेक्ट्रिक वाहनांच्या तंत्रज्ञानातील प्रगतीमुळे आहे. प्रत्येक चाक आणि प्रगत पॉवर इलेक्ट्रॉनिक्ससाठी इलेक्ट्रिक मोटरसह योजना अंमलात आणणे खूप सोपे आहे.
या कारना यापुढे ड्राईव्हच्या प्रकाराबद्दल अभियांत्रिकी ज्ञानाची आवश्यकता नाही. ड्रायव्हर फक्त एक्सलेटर पेडल नियंत्रित करेल, बाकीची कार करेल.