हेडलाइट सुधारक म्हणजे काय: प्रकार, ऑपरेशनचे सिद्धांत आणि खराबी
सामग्री
हाय बीम हेडलाइट्स, हेड लाइटिंग, मॅन्युअली किंवा आपोआप येणाऱ्या ट्रॅफिकच्या चालकाला चकचकीत होण्याचा धोका असल्यास, लो बीम मोडवर स्विच करा. परंतु हे पुरेसे नाही, जरी हेडलाइट्स योग्यरित्या समायोजित केले असले तरीही, त्यांची स्थिती एखाद्या विशिष्ट परिस्थितीशी संबंधित रस्त्याच्या सापेक्ष समायोजित करणे आवश्यक आहे. यासाठी दोन्ही कारणे आहेत आणि कारच्या बाह्य प्रकाश प्रणालीचा भाग म्हणून संबंधित उपकरणे.

आपल्याला हेडलाइट सुधारक का आवश्यक आहे
लो बीम आणि हाय बीममधील फरक म्हणजे प्रकाशित क्षेत्र आणि हेडलाइटमध्ये तयार केलेल्या स्क्रीनवरील सावली यांच्यातील स्पष्ट उभ्या सीमेची उपस्थिती.
स्क्रीनची भूमिका विविध ऑप्टिकल योजना आणि तत्त्वांद्वारे केली जाऊ शकते, परंतु समस्येचे सार यातून बदलत नाही - या मोडमधील हेडलाइट्स येणार्या ड्रायव्हर्सच्या नजरेत येऊ नयेत. यामुळे रस्त्याची रोषणाई कमी होते, परंतु तुम्हाला सुरक्षिततेच्या बाजूने कार्यक्षमतेचा त्याग करावा लागेल.

कट-ऑफ लाइनची स्थिती कारच्या शरीराशी संबंधित हेडलाइटच्या झुकावच्या कोनाद्वारे सेट केली जाते. सर्व्हिस स्टेशनवर मार्क्स किंवा ऑप्टिकल स्टँडसह स्क्रीनवरील बाह्य प्रकाश समायोजित करताना ते सेट केले जाते.
तांत्रिक तपासणी दरम्यान समायोजनांची सुरक्षा नियंत्रित केली जाते. हाय-बीम हेडलाइट्स सर्चलाइट्सप्रमाणे काम करतात आणि बीमच्या स्थानावर आणि प्रकाशाच्या शक्तीवर कोणतेही विशेष निर्बंध नाहीत. जरी त्यांनी रस्ता प्रकाशित केला पाहिजे, उपग्रह कक्षेत नाही.
परंतु हेडलाइट हाउसिंग, रिफ्लेक्टर आणि शरीराच्या सापेक्ष प्रकाश बीमची भूमिती मर्यादित करण्यासाठी डिव्हाइसची योग्य स्थिती सुनिश्चित केल्यामुळे, रस्त्याच्या सापेक्ष सीमेच्या सुरक्षिततेची हमी देणे अशक्य आहे. परंतु हेच महत्त्वाचे आहे, येणाऱ्या ड्रायव्हर्सच्या डोळ्यांची स्थिती त्याच्या प्रोफाइलशी जोडलेली आहे.
दरम्यान, क्षैतिज विमानाशी संबंधित कारच्या कलतेचा कोन सॉफ्ट सस्पेंशनच्या उपस्थितीमुळे स्थिर असू शकत नाही.
जर तुम्ही कारच्या मागील बाजूस लोड केले तर, जेथे अतिरिक्त प्रवासी आणि सामानाचा डबा बहुतेक वेळा स्थित असतो, तर शरीराला विमान चालवण्याच्या दृष्टीने, पिचिंगसाठी एक पिच एंगल मिळेल, म्हणजेच ते मागे फिरेल आणि हेडलाइट्स सुरू होतील. आकाशात चमकण्यासाठी.

सर्व बारीकसारीक समायोजन अयशस्वी होतील, येणार्या गाड्या आंधळ्या केल्या जातील, जे एक तीक्ष्ण कट-ऑफ लाईनसह सुविचारित बीम निर्मितीचे डिझाइन रद्द करेल. समायोजन बदलणे आवश्यक आहे, परंतु कारच्या प्रत्येक व्हेरिएबल लोडिंग किंवा अनलोडिंगसह हे करू नये. परिणामी, डिझाइनमध्ये हेडलाइट करेक्टर नावाचे उपकरण सादर केले गेले.
कुठे आहे
दुरुस्तीसाठी, हेडलाइट हाउसिंगमधील ऑप्टिकल एलिमेंटचा टिल्ट वापरला जातो. मागील बाजूस संबंधित लीव्हर सुधारक अॅक्ट्युएटरद्वारे सक्रिय केला जातो, जो ऑपरेशनच्या तत्त्वानुसार सर्वात वैविध्यपूर्ण प्रकारचा असू शकतो.

हे कसे कार्य करते
मॅन्युअल दुरुस्तीसह, ड्रायव्हर केबिनमधील रेग्युलेटरची स्थिती सहजतेने किंवा अनेक निश्चित स्थितींपैकी एकावर हलवतो.
यांत्रिक, इलेक्ट्रिकल किंवा हायड्रॉलिक कनेक्शनद्वारे, हालचाल ऑप्टिकल घटकामध्ये प्रसारित केली जाते. ड्रायव्हर रस्त्यावरील लाइट बीमची स्थिती कशी बदलते ते पाहतो आणि अंतरापर्यंत सर्वोत्तम दृश्यमानतेसह स्थान निवडतो, परंतु आंधळेपणाशिवाय.

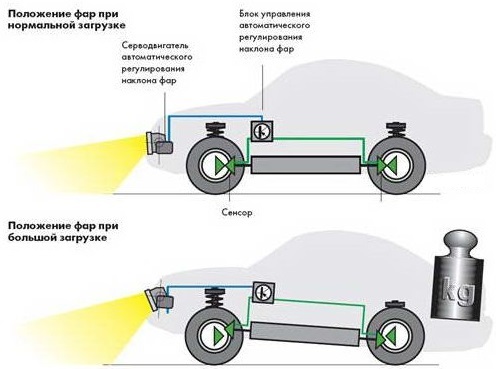
स्वयंचलित सुधारणा शरीराच्या झुकण्याच्या कोनात बदलांचा मागोवा घेण्यास सक्षम आहे, रस्त्याच्या तुलनेत प्रकाश बीमची स्थिती राखून ठेवते.
हे ड्रायव्हरला मॅन्युअल वर्क आणि संबंधित स्पॉट पोझिशन त्रुटी आणि विस्मरणापासून वाचवते. सुरक्षा लक्षणीय वाढते. खरंच, गंभीर अपघात होण्यासाठी, अंधत्वाची एक अयशस्वी केस पुरेसे आहे.
हेडलाइट सुधारकांचे प्रकार
तंत्राची प्रभावीता आणि त्याची किंमत यांच्यातील ट्रेड-ऑफच्या शाश्वत थीममुळे सुधारकांची विविधता उद्भवते.

यांत्रिक
सर्वात सोपा उपाय म्हणजे हेडलाइटमध्ये एडजस्टिंग स्क्रू हूडच्या खाली सहज प्रवेश करणे.
कार खरेदी करताना ड्रायव्हर खूप बचत करेल, परंतु प्रत्येक लोड बदलासह हुड उघडण्यास भाग पाडले जाईल आणि कमी बीमची कट-ऑफ लाइन मॅन्युअली सेट करेल. अनेक प्रयत्न वापरणे किंवा विशेष चिन्हांकित स्क्रीन वापरणे.

वायवीय
वायवीय ड्राइव्ह हूड उघडण्याची गरज काढून टाकते, नियामक डॅशबोर्डवर ठेवला जातो आणि हेडलाइटवरची शक्ती एअर लाइनद्वारे प्रसारित केली जाते.
सामान्यतः इंजिनच्या सेवन मॅनिफोल्डमध्ये व्हॅक्यूम वापरला जातो. फार क्वचितच उद्भवते.

हायड्रॉलिक
हायड्रॉलिक ड्राइव्ह सोयीस्कर आहे, ते ब्रेक, क्लच कंट्रोल आणि इतर असंख्य प्रकरणांमध्ये वापरले जाते. पॅसेंजर कंपार्टमेंटमधील अॅडजस्टिंग हँडलपासून हेडलाइटच्या जवळ असलेल्या स्लेव्ह सिलेंडरमध्ये शक्ती हस्तांतरित करण्यात हे कमी प्रभावीपणे कार्य करणार नाही.

अर्थात, येथे प्रणाली खूपच सोपी आणि स्वस्त आहे, कारण दाब लहान आहेत, प्लास्टिकचे भाग आणि स्वस्त सिलिकॉन द्रव वापरले जातात.
इलेक्ट्रोमेकॅनिकल
इलेक्ट्रिक ऍडजस्टमेंट आपल्याला द्रव किंवा वायवीय अॅक्ट्युएटर्सपासून मुक्त करण्याची परवानगी देतात. हँडल हलवल्याने हेडलाइटवरील करेक्टर सर्वो ड्राइव्हमधून सिंक्रोनस कार्य होते.
सर्किटरीमध्ये, हे अवघड असू शकते, परंतु मोठ्या प्रमाणावर उत्पादनामध्ये ते केबल किंवा हायड्रॉलिक ड्राइव्हसह यांत्रिकीपेक्षा स्वस्त आहे. याव्यतिरिक्त, अशा नोड्स लाइट सीमेची स्वयंचलित देखभाल लागू करणे सोपे करतात.

इलेक्ट्रोमेकॅनिकल ड्राइव्हसह स्वयंचलित सुधारकांमध्ये निलंबनामध्ये सेन्सर असतात जे त्याच्या लीव्हरची स्थिती मोजतात.
डेटा, सामान्यत: व्हेरिएबल रेझिस्टन्सच्या स्वरूपात, इलेक्ट्रॉनिक युनिटमध्ये प्रसारित केला जातो, जो प्रीसेट आणि वर्तमान स्थितीमधील परिणामी जुळत नाही.
रस्त्यावरील अडथळ्यांवरून गाडी चालवतानाही हेडलाइट्स नेहमी कुठे पाहिजे ते पाहतात. पुढची पायरी केवळ प्रकाश मॅट्रिक्ससह पूर्णपणे इलेक्ट्रो-ऑप्टिकल नियंत्रण असेल जे येणार्या ड्रायव्हरच्या डोळ्यांची प्रकाश रोखते.
ठराविक दोष
हायड्रॉलिक तत्त्वानुसार मॅन्युअल समायोजन प्रणाली, विशेषत: यांत्रिक स्क्रू, खूप विश्वासार्ह आहेत, तेथे खंडित करण्यासाठी काहीही नाही. हायड्रॉलिक अयशस्वी झाल्यास, असेंब्ली एक सेट म्हणून बदलली जाते.
इलेक्ट्रोमेकॅनिकल सुधारक अधिक आधुनिक आणि कमी विश्वासार्ह आहेत. अधिक तंतोतंत, सैद्धांतिकदृष्ट्या ते व्यावहारिकदृष्ट्या चिरंतन केले जाऊ शकतात, परंतु उत्पादक नेहमी बचत करतात.
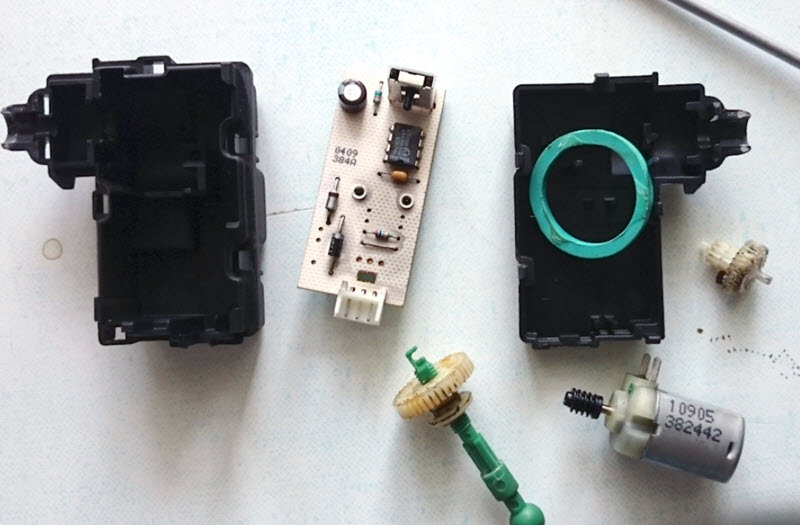
परिणामी, पोटेंशियोमेट्रिक सेन्सर, सर्वो कलेक्टर आणि गिअरबॉक्सेसचे प्लास्टिक गिअर्स अयशस्वी होतात (पुसतात).
वैयक्तिक नोड्ससाठी बदली केली जाते, हे सेन्सर, अॅक्ट्युएटर, प्लास्टिक रॉड आहेत. जर ओलावा वायरिंगमधील संपर्कांमध्ये प्रवेश करते आणि खराब करते तेव्हाच इलेक्ट्रॉनिक सर्किट्स अयशस्वी होऊ शकतात.
समायोजन आणि दुरुस्ती
वैयक्तिक घटक बदलून दुरुस्ती केल्यानंतर, सुधारकास समायोजन आवश्यक असेल, म्हणजेच नाममात्र प्रदीपन मर्यादा सेट करणे.
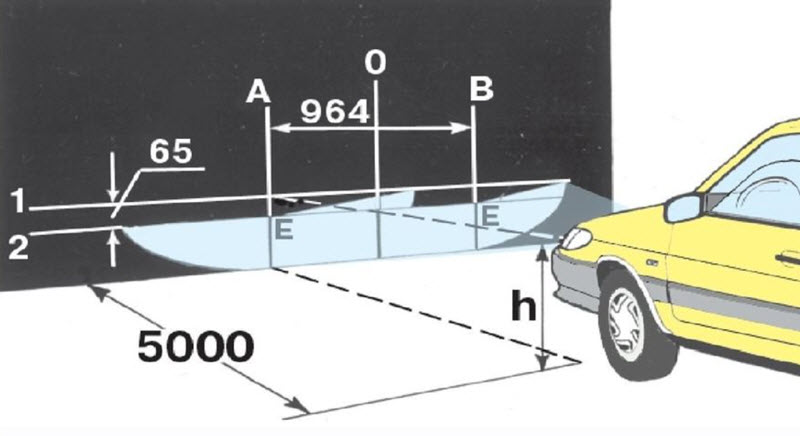
यासाठी, विशिष्ट कार मॉडेलसाठी दुरुस्ती दस्तऐवजीकरणामध्ये निर्दिष्ट केलेल्या अंतरावर एक चिन्हांकित स्क्रीन वापरली जाते.
हेडलाइट्स रेग्युलेटरच्या तटस्थ स्थितीत लाईट बीमच्या कोनानुसार सेट केले जातात, त्यानंतर ते तपासले जाते की ते सीमेच्या वर आणि खाली हालचाली करते.

निलंबनामधील स्वयंचलित सेन्सरची स्थिती स्कॅनरच्या रीडिंगद्वारे नियंत्रित केली जाते, जी त्यांच्याद्वारे एका विशिष्ट चाचणी लोडवर नियंत्रण युनिटवर प्रसारित केलेली माहिती वाचते, म्हणजेच निलंबन शस्त्रांची स्थिती.
अधिक जटिल प्रकरणांमध्ये, सेन्सरपासून रस्त्यापर्यंतचे अंतर नियंत्रित केले जाते, ज्यासाठी स्थापना पद्धत देखील आवश्यक असेल. एक यशस्वी परिणाम म्हणजे शून्य ते कमाल पर्यंत वाहन लोड पासून प्रकाश सीमा स्थितीचे स्वातंत्र्य मानले जाऊ शकते.