यांत्रिक आणि इलेक्ट्रॉनिक स्पीडोमीटर. डिव्हाइस आणि ऑपरेशनचे सिद्धांत
स्पीडोमीटर कारच्या डॅशबोर्डवर सर्वात प्रमुख ठिकाणी स्थित आहे हा योगायोग नाही. शेवटी, हे डिव्हाइस तुम्ही किती वेगाने गाडी चालवत आहात हे दाखवते आणि तुम्हाला परवानगी असलेल्या वेग मर्यादेचे पालन नियंत्रित करण्यास अनुमती देते, ज्यामुळे थेट रस्ता सुरक्षिततेवर परिणाम होतो. चला वेगवान तिकिटांबद्दल विसरू नका, जे आपण अधूनमधून स्पीडोमीटरकडे पाहिल्यास टाळता येऊ शकते. याव्यतिरिक्त, या डिव्हाइसच्या मदतीने देशातील रस्त्यावर, आपण इंधनाचा वापर कमीत कमी इष्टतम गती राखल्यास आपण इंधन वाचवू शकता.
मेकॅनिकल स्पीड मीटरचा शोध शंभर वर्षांपूर्वी लागला होता आणि आजही वाहनांमध्ये मोठ्या प्रमाणावर वापरला जातो. येथे सेन्सर सामान्यतः एक गियर असतो जो दुय्यम शाफ्टवर विशेष गियरसह मेश करतो. फ्रंट-व्हील ड्राइव्ह वाहनांमध्ये, सेन्सर ड्राइव्ह व्हीलच्या अक्षावर आणि ट्रान्सफर प्रकरणात ऑल-व्हील ड्राइव्ह वाहनांमध्ये स्थित असू शकतो.

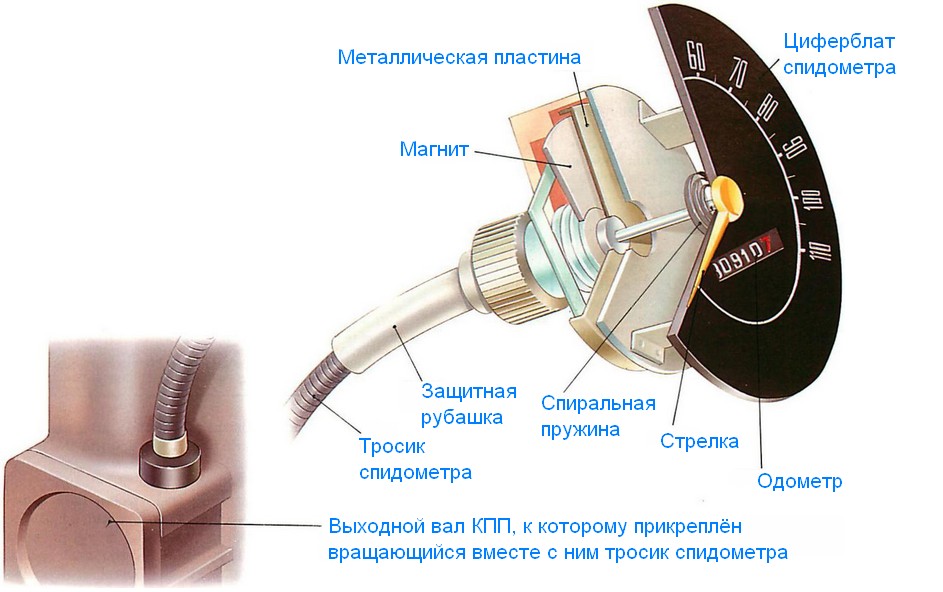
डॅशबोर्डवर स्पीड इंडिकेटर (6) म्हणून, एक पॉइंटर डिव्हाइस वापरला जातो, ज्याचे ऑपरेशन चुंबकीय प्रेरण तत्त्वावर आधारित आहे.
सेन्सर (1) पासून स्पीड इंडिकेटर (खरेतर स्पीडोमीटर) पर्यंत रोटेशनचे प्रसारण लवचिक शाफ्ट (केबल) (2) दोन्ही टोकांना टेट्राहेड्रल टीप असलेल्या अनेक वळणा-या स्टीलच्या धाग्यांमधून केले जाते. केबल एका विशेष प्लास्टिकच्या संरक्षणात्मक आवरणात त्याच्या अक्षाभोवती मुक्तपणे फिरते.
अॅक्ट्युएटरमध्ये कायम चुंबक (3) असतो, जो ड्राइव्ह केबलवर बसविला जातो आणि त्याच्यासह फिरतो आणि अॅल्युमिनियम सिलेंडर किंवा डिस्क (4), ज्याच्या अक्षावर स्पीडोमीटर सुई निश्चित केली जाते. मेटल स्क्रीन बाह्य चुंबकीय क्षेत्राच्या प्रभावापासून संरचनेचे संरक्षण करते, ज्यामुळे डिव्हाइसचे वाचन विकृत होऊ शकते.
चुंबकाच्या फिरण्यामुळे अ-चुंबकीय पदार्थ (अॅल्युमिनियम) मध्ये एडी प्रवाह निर्माण होतात. फिरणाऱ्या चुंबकाच्या चुंबकीय क्षेत्राशी परस्परसंवादामुळे अॅल्युमिनियम डिस्क देखील फिरते. तथापि, रिटर्न स्प्रिंग (5) च्या उपस्थितीमुळे डिस्क, आणि त्यासह पॉइंटर बाण, केवळ वाहनाच्या वेगाच्या प्रमाणात विशिष्ट कोनातून फिरते.
एका वेळी, काही उत्पादकांनी यांत्रिक स्पीडोमीटरमध्ये टेप आणि ड्रम-प्रकारचे निर्देशक वापरण्याचा प्रयत्न केला, परंतु ते फारसे सोयीस्कर नव्हते आणि शेवटी ते सोडून दिले गेले.

ड्राईव्हच्या रूपात लवचिक शाफ्टसह यांत्रिक स्पीडोमीटरची साधेपणा आणि गुणवत्ता असूनही, हे डिझाइन अनेकदा एक मोठी त्रुटी देते आणि केबल स्वतःच त्यातील सर्वात समस्याप्रधान घटक आहे. म्हणूनच, पूर्णपणे यांत्रिक स्पीडोमीटर हळूहळू भूतकाळातील गोष्ट बनत आहेत, इलेक्ट्रोमेकॅनिकल आणि इलेक्ट्रॉनिक उपकरणांना मार्ग देत आहेत.
इलेक्ट्रोमेकॅनिकल स्पीडोमीटर एक लवचिक ड्राइव्ह शाफ्ट देखील वापरतो, परंतु डिव्हाइसमधील चुंबकीय इंडक्शन स्पीड असेंबली वेगळ्या पद्धतीने मांडली जाते. अॅल्युमिनियम सिलेंडरऐवजी, येथे एक इंडक्टर स्थापित केला आहे, ज्यामध्ये बदलत्या चुंबकीय क्षेत्राच्या प्रभावाखाली विद्युत प्रवाह तयार केला जातो. कायम चुंबकाच्या रोटेशनचा वेग जितका जास्त असेल तितका कॉइलमधून वाहणारा विद्युत् प्रवाह जास्त असेल. पॉइंटर मिलिअममीटर कॉइल टर्मिनल्सशी जोडलेले आहे, जे स्पीड इंडिकेटर म्हणून वापरले जाते. असे उपकरण आपल्याला यांत्रिक स्पीडोमीटरच्या तुलनेत रीडिंगची अचूकता वाढविण्यास अनुमती देते.
इलेक्ट्रॉनिक स्पीडोमीटरमध्ये, स्पीड सेन्सर आणि डॅशबोर्डमधील डिव्हाइसमध्ये कोणतेही यांत्रिक कनेक्शन नसते.
डिव्हाइसच्या हाय-स्पीड युनिटमध्ये एक इलेक्ट्रॉनिक सर्किट आहे जो स्पीड सेन्सरकडून प्राप्त झालेल्या इलेक्ट्रिकल पल्स सिग्नलवर तारांद्वारे प्रक्रिया करतो आणि त्याच्या आउटपुटमध्ये संबंधित व्होल्टेज आउटपुट करतो. हे व्होल्टेज डायल मिलिअममीटरवर लागू केले जाते, जे स्पीड इंडिकेटर म्हणून काम करते. अधिक आधुनिक उपकरणांमध्ये, स्टेपर ICE पॉइंटर नियंत्रित करते.
स्पीड सेन्सर म्हणून, विविध उपकरणे वापरली जातात जी स्पंदित विद्युत सिग्नल तयार करतात. असे उपकरण, उदाहरणार्थ, एक नाडी प्रेरक सेन्सर किंवा ऑप्टिकल जोडी (प्रकाश उत्सर्जक डायोड + फोटोट्रांझिस्टर) असू शकते, ज्यामध्ये शाफ्टवर बसविलेल्या स्लॉटेड डिस्कच्या रोटेशन दरम्यान प्रकाश संप्रेषणाच्या व्यत्ययामुळे डाळींची निर्मिती होते.

परंतु, कदाचित, सर्वात मोठ्या प्रमाणावर वापरलेले स्पीड सेन्सर, ज्याच्या ऑपरेशनचे सिद्धांत हॉल इफेक्टवर आधारित आहे. जर तुम्ही एखादा कंडक्टर ठेवला ज्याद्वारे चुंबकीय क्षेत्रात थेट प्रवाह वाहतो, तर त्यात एक ट्रान्सव्हर्स संभाव्य फरक उद्भवतो. जेव्हा चुंबकीय क्षेत्र बदलते तेव्हा संभाव्य फरकाची विशालता देखील बदलते. जर स्लॉट किंवा लेज असलेली ड्रायव्हिंग डिस्क चुंबकीय क्षेत्रामध्ये फिरत असेल, तर आपल्याला ट्रान्सव्हर्स संभाव्य फरकामध्ये एक आवेग बदल मिळतो. डाळींची वारंवारता मास्टर डिस्कच्या रोटेशनच्या गतीच्या प्रमाणात असेल.

पॉइंटर ऐवजी गती प्रदर्शित करण्यासाठी असे घडते की डिजिटल डिस्प्ले वापरला जातो. तथापि, स्पीडोमीटर सेटवर सतत बदलणारे क्रमांक ड्रायव्हरला बाणाच्या सहज हालचालीपेक्षा वाईट समजतात. आपण विलंब प्रविष्ट केल्यास, तात्काळ वेग अगदी अचूकपणे प्रदर्शित केला जाऊ शकत नाही, विशेषत: प्रवेग किंवा घसरण दरम्यान. म्हणून, स्पीडोमीटरमध्ये अॅनालॉग पॉइंटर्स अजूनही प्रचलित आहेत.
ऑटोमोटिव्ह उद्योगात सतत तांत्रिक प्रगती असूनही, स्पीडोमीटर रीडिंगची अचूकता फारशी उच्च नाही हे अनेकांच्या लक्षात येते. आणि हे वैयक्तिक ड्रायव्हर्सच्या अतिक्रियाशील कल्पनेचे फळ नाही. आधीच उपकरणांच्या निर्मितीमध्ये उत्पादकांद्वारे एक लहान त्रुटी जाणूनबुजून मांडली जाते. शिवाय, ही त्रुटी नेहमी मोठ्या दिशेने असते, अशा परिस्थिती वगळण्यासाठी जेव्हा, विविध घटकांच्या प्रभावाखाली, स्पीडोमीटर रीडिंग कारच्या संभाव्य वेगापेक्षा कमी असेल. हे असे केले जाते जेणेकरून ड्रायव्हरने चुकीने यंत्रावरील चुकीच्या मूल्यांद्वारे मार्गदर्शित वेग ओलांडू नये. सुरक्षिततेची खात्री करण्याव्यतिरिक्त, उत्पादक त्यांचे स्वतःचे हित जोपासतात - ते असंतुष्ट ड्रायव्हर्सकडून खटले वगळण्याचा प्रयत्न करतात ज्यांना दंड आकारला गेला आहे किंवा खोट्या स्पीडोमीटर रीडिंगमुळे अपघात झाला आहे.
स्पीडोमीटरची त्रुटी, एक नियम म्हणून, नॉन-रेखीय आहे. हे सुमारे 60 किमी/तास वेगाने शून्याच्या जवळ आहे आणि हळूहळू वेगाने वाढते. 200 किमी / तासाच्या वेगाने, त्रुटी 10 टक्क्यांपर्यंत पोहोचू शकते.
इतर घटक देखील वाचनाच्या अचूकतेवर परिणाम करतात, जसे की स्पीड सेन्सरशी संबंधित. हे विशेषतः यांत्रिक स्पीडोमीटरच्या बाबतीत खरे आहे, ज्यामध्ये गीअर्स हळूहळू संपतात.
बर्याचदा, कारचे मालक स्वतःच अतिरिक्त त्रुटी करतात ज्याचा आकार नाममात्रापेक्षा भिन्न असतो. वस्तुस्थिती अशी आहे की सेन्सर गिअरबॉक्स आउटपुट शाफ्टच्या क्रांतीची गणना करतो, जी चाकांच्या क्रांतीच्या प्रमाणात असते. परंतु कमी झालेल्या टायरच्या व्यासासह, कार नाममात्र आकाराच्या टायरपेक्षा चाकाच्या एका आवर्तनात कमी अंतर पार करेल. आणि याचा अर्थ असा की स्पीडोमीटर संभाव्य वेगाच्या तुलनेत 2 ... 3 टक्क्यांनी जास्त अंदाजित वेग दर्शवेल. कमी फुगलेल्या टायरसह वाहन चालवण्याचा परिणाम समान होईल. त्याउलट, वाढीव व्यासासह टायर स्थापित केल्याने स्पीडोमीटर रीडिंगला कमी लेखले जाईल.
नेहमीच्या ऐवजी, आपण या विशिष्ट कार मॉडेलमध्ये कार्य करण्यासाठी डिझाइन केलेले नसलेले स्पीडोमीटर स्थापित केल्यास त्रुटी पूर्णपणे अस्वीकार्य असू शकते. सदोष डिव्हाइस पुनर्स्थित करणे आवश्यक असल्यास हे लक्षात घेतले पाहिजे.
प्रवास केलेले अंतर मोजण्यासाठी ओडोमीटरचा वापर केला जातो. हे स्पीडोमीटरसह गोंधळून जाऊ नये. खरं तर, ही दोन भिन्न उपकरणे आहेत, जी बर्याचदा एका प्रकरणात एकत्रित केली जातात. हे या वस्तुस्थितीद्वारे स्पष्ट केले आहे की दोन्ही उपकरणे, एक नियम म्हणून, समान सेन्सर वापरतात.
ड्राईव्ह म्हणून लवचिक शाफ्ट वापरण्याच्या बाबतीत, ओडोमीटरच्या इनपुट शाफ्टमध्ये रोटेशनचे प्रसारण मोठ्या गियर रेशोसह गीअरबॉक्सद्वारे केले जाते - 600 ते 1700 पर्यंत. पूर्वी, एक वर्म गियर वापरला जात होता, ज्यासह फिरवलेल्या संख्येसह गीअर्स. आधुनिक अॅनालॉग ओडोमीटरमध्ये, चाकांचे फिरणे स्टेपर मोटर्सद्वारे नियंत्रित केले जाते.

वाढत्या प्रमाणात, तुम्ही अशी उपकरणे शोधू शकता ज्यामध्ये कारचे मायलेज लिक्विड क्रिस्टल डिस्प्लेवर डिजिटल पद्धतीने प्रदर्शित केले जाते. या प्रकरणात, प्रवास केलेल्या अंतराची माहिती इंजिन कंट्रोल युनिटमध्ये डुप्लिकेट केली जाते आणि असे होते की कारच्या इलेक्ट्रॉनिक कीमध्ये. जर तुम्ही डिजीटल ओडोमीटर प्रोग्रॅमॅटिक पद्धतीने बंद केले तर संगणक निदानाद्वारे खोटेपणा अगदी सहजपणे शोधला जाऊ शकतो.
स्पीडोमीटरमध्ये समस्या असल्यास, कोणत्याही परिस्थितीत त्याकडे दुर्लक्ष केले जाऊ नये, ते त्वरित निश्चित केले जाणे आवश्यक आहे. हे तुमच्या आणि इतर रस्ता वापरकर्त्यांच्या सुरक्षिततेबद्दल आहे. आणि जर कारण सदोष सेन्सरमध्ये असेल तर समस्या देखील उद्भवू शकतात, कारण इंजिन कंट्रोल युनिट चुकीच्या स्पीड डेटावर आधारित युनिटच्या ऑपरेशनचे नियमन करेल.
